라이다의 종류에 대해서 알아보자
라이다 개요
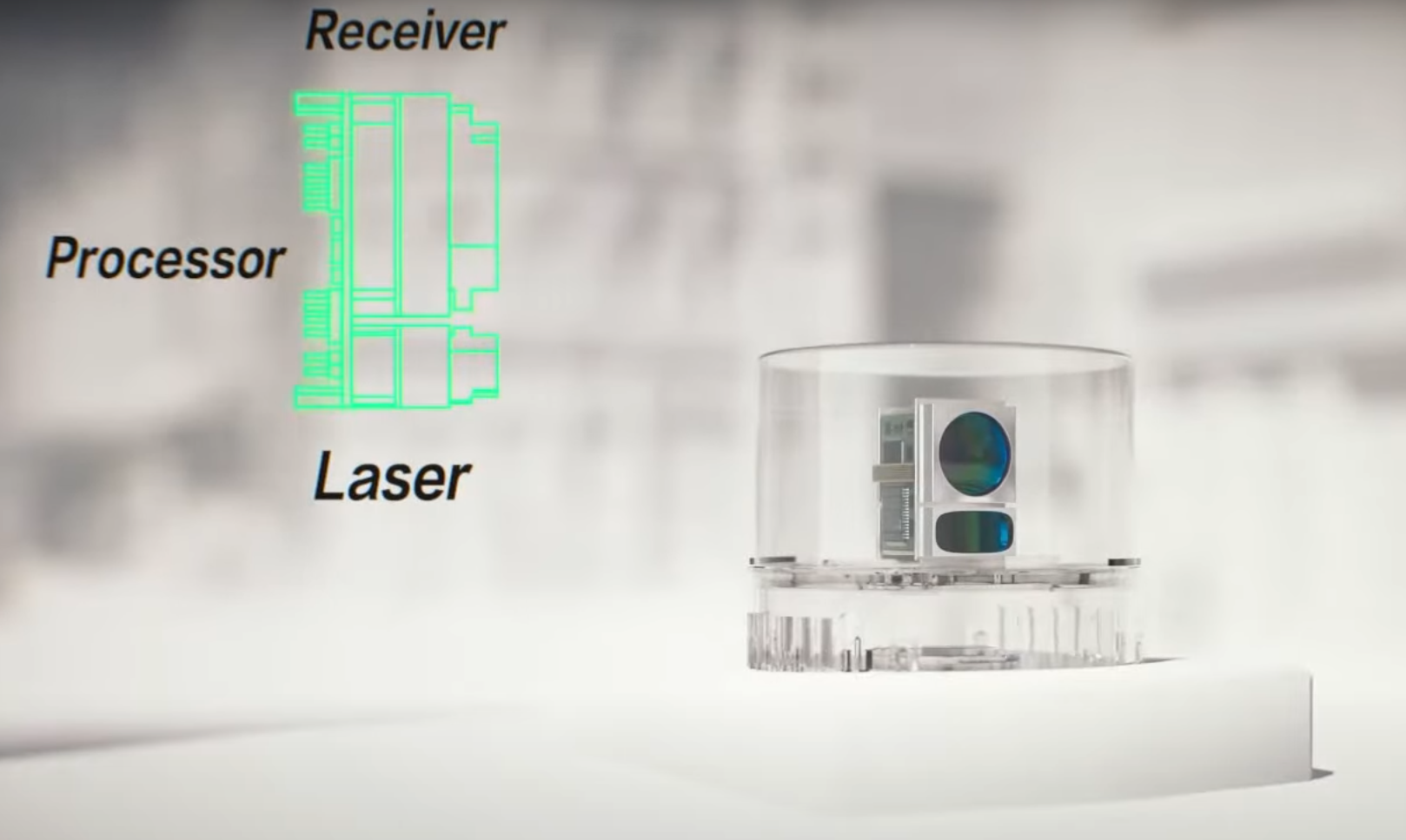
라이다는 기본적으로 Laser, Recevier, Processor로 구성되어 있다.
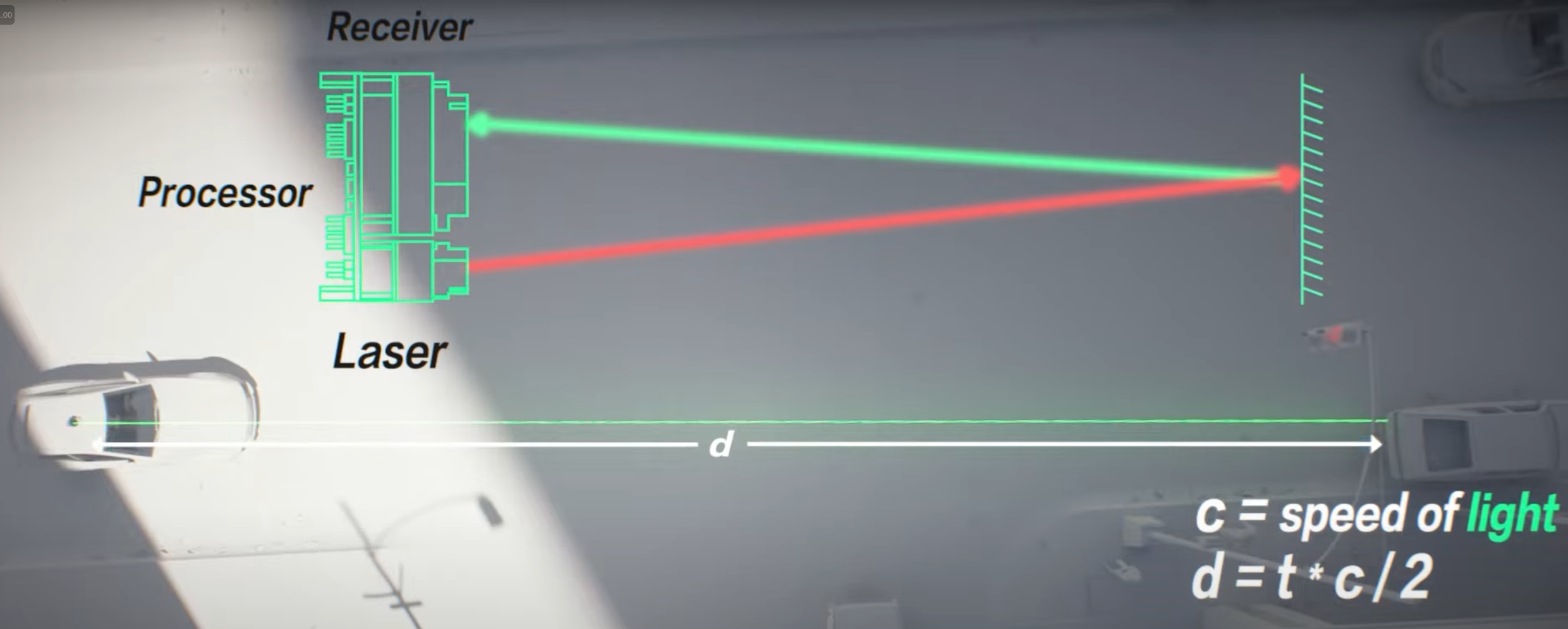
Laser에서 빛을 쏘고, 이 빛이 장애물에 반사가 되면, Receiver가 빛을 받는다. 이때 거리를 측정하기 위해, 빛의 속도와 시간을 이용한다. 이 기술을 TOF(Time of Flight) 라 부른다. \[ c = speed\ of\ light \\ d = t*c/2 \]
고려해야하는 사항 (Spec)
1. FOV (Field of View)
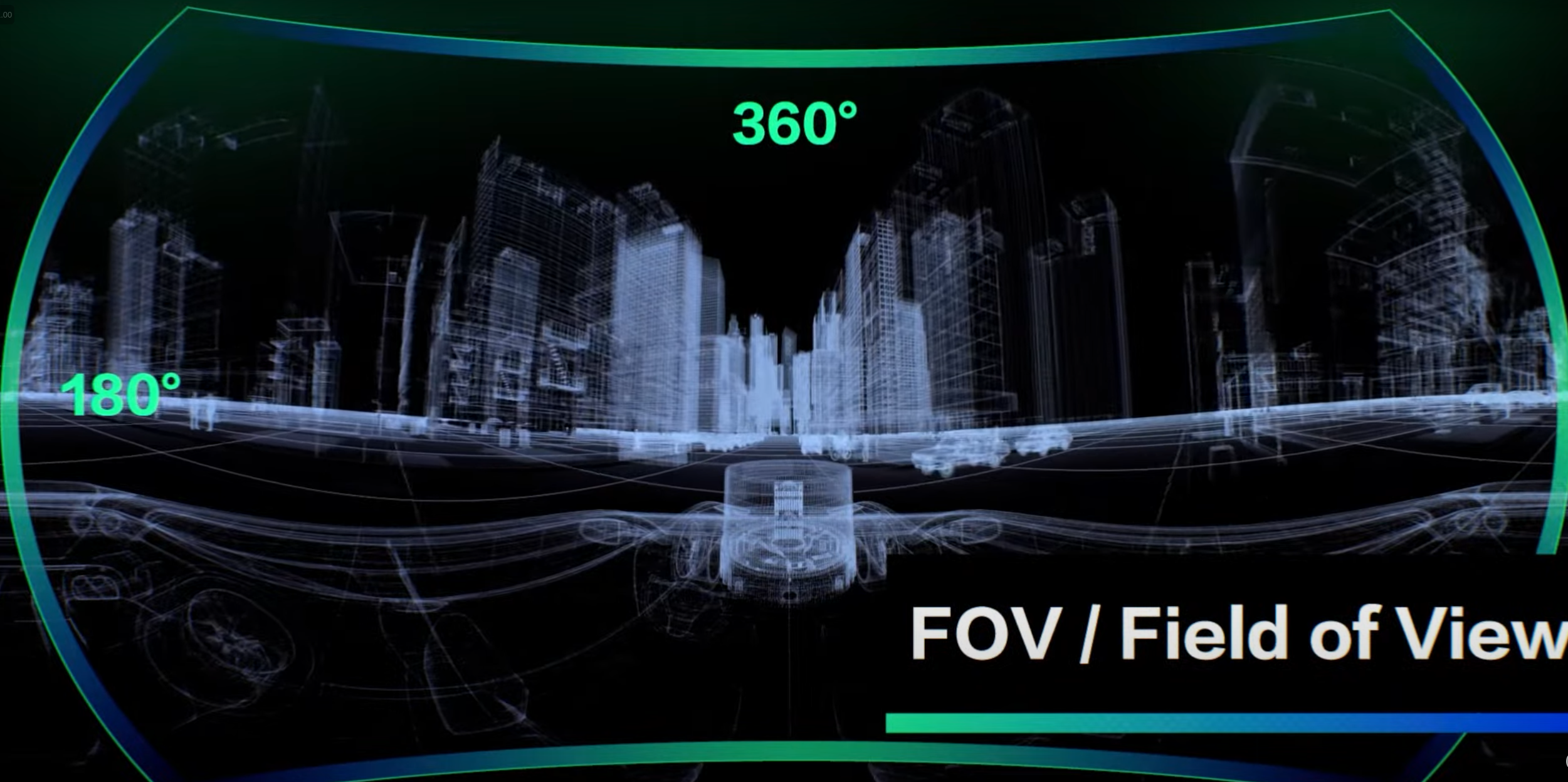
- 어느정도의 영역을 커버할 수 있는 가를 말함
2. Range
3. Resolution
4. accuary
라이다의 타입
3D 라이다는 다양한 타입의 모델이 존재한다.
Spinning type
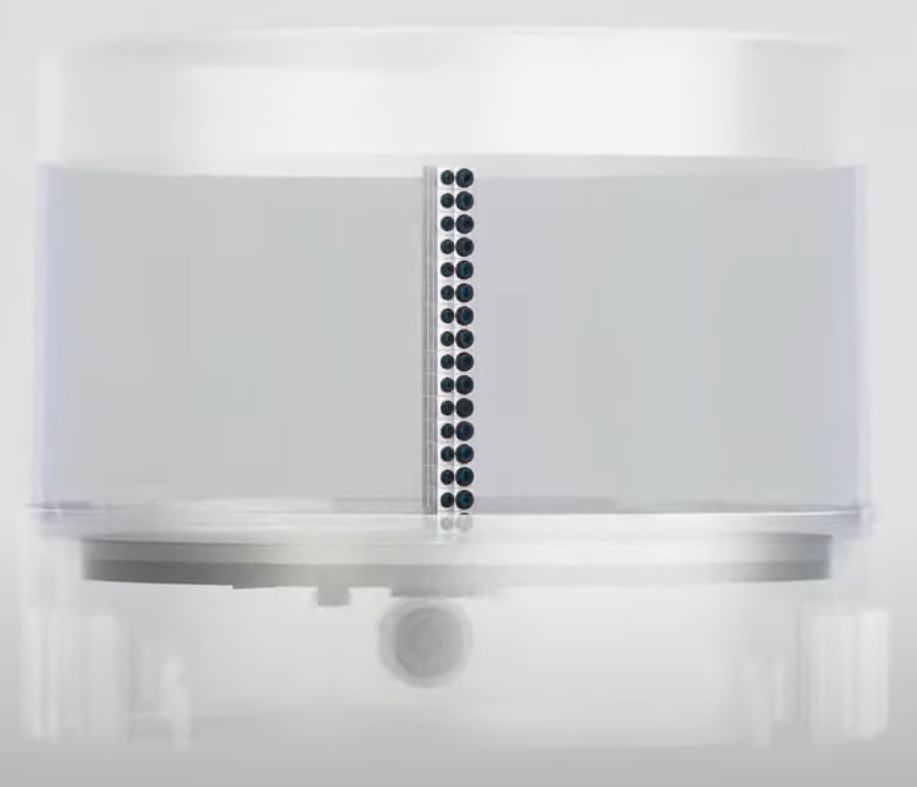
image-20240706130805126 위 그림과 같이 센서들이 수직으로 배열되어 있으며, 모터가 센서를 회전시켜가면서 값을 취득하는 방법이다.
이는 수직으로 배열된 레이저 모듈이기에 거리가 증가함에 따라 point의 밀도는 점차적으로 줄어든다.
detection range와 resolution을 증가시키기 위한 한가지 방법은 transmit-receive 모듈을 추가하는 것이다.
센서의 수가 늘어날수록, calibration을 하기가 힘들어져 비용이 기하급수적으로 증가한다.
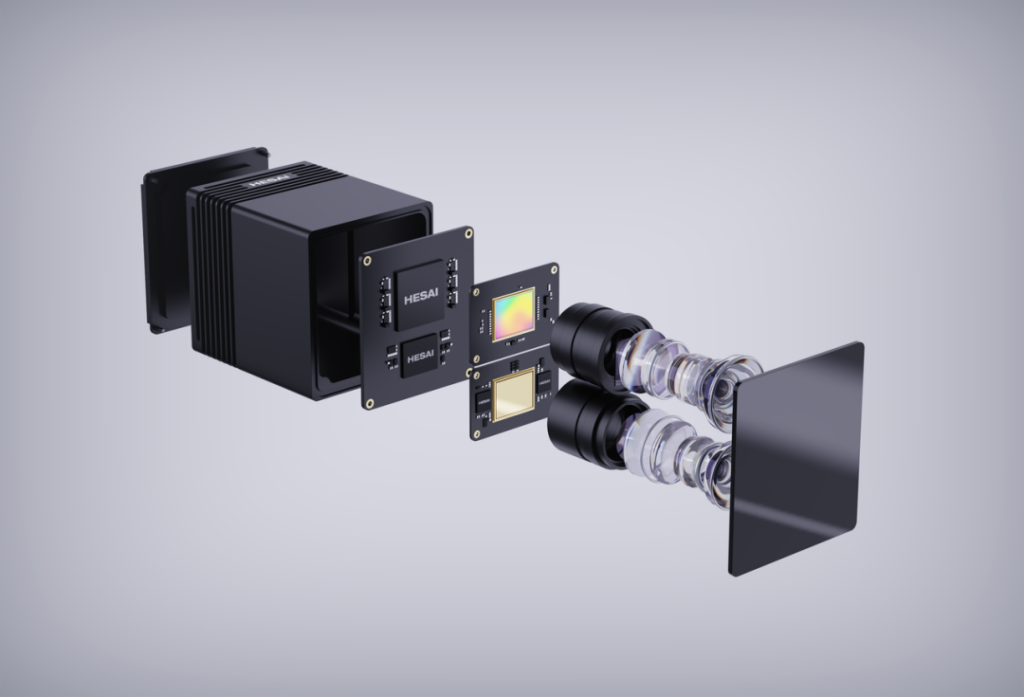
Hybrid solid-state LiDAR
Peek 2024-07-06 13-15 - 제한된 각도로 회전하는 두개의 거울을 사용한다.
- 폴리곤 거울은 회전하며 레이저가 수평으로 스캔되도록 하고, 위아래로 흔들리는 거울을 레이저 빔을 수직으로 굴절시킨다.
- spinning type에 비해서 매우 높은 hz가 필요하다. 즉 잘 고장날 가능성이 높다.
MEMS module LiDAR
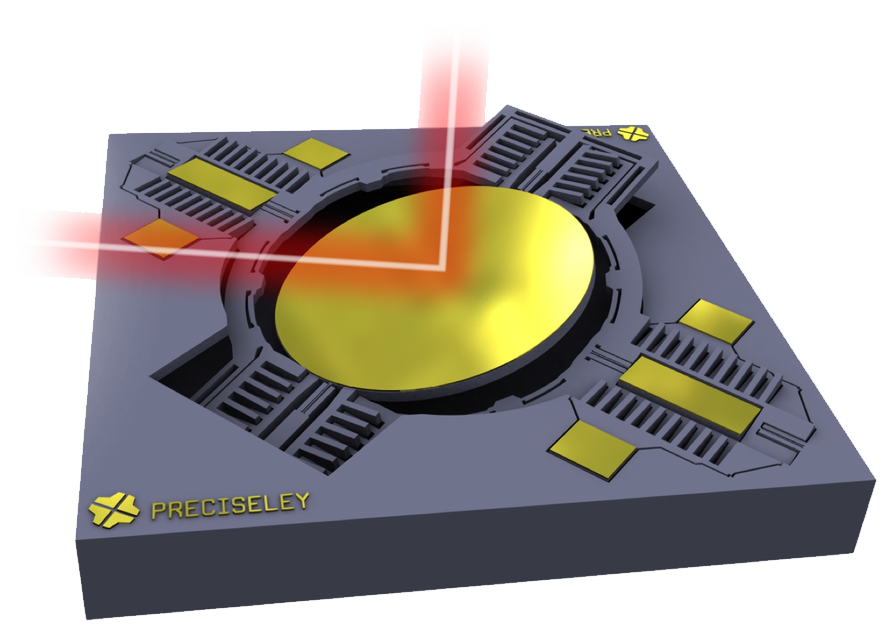
test-product - MEMS 시스템을 통해 고주파로 회전하며 레이저 빔을 반사하는 방식임.
- Recevier가 먼 거리의 물체를 감지하기 위해서는 충분한 빛을 받아야하기에 먼 거리의 값을 측정하기 어렵다.
- 거울이 커질수록 고주파의 진동을 견디기 어렵다.
- 내구성 문제가 있다.
- 제한된 회전각도로 인해 FOV가 낮다.
Solid-state LiDAR
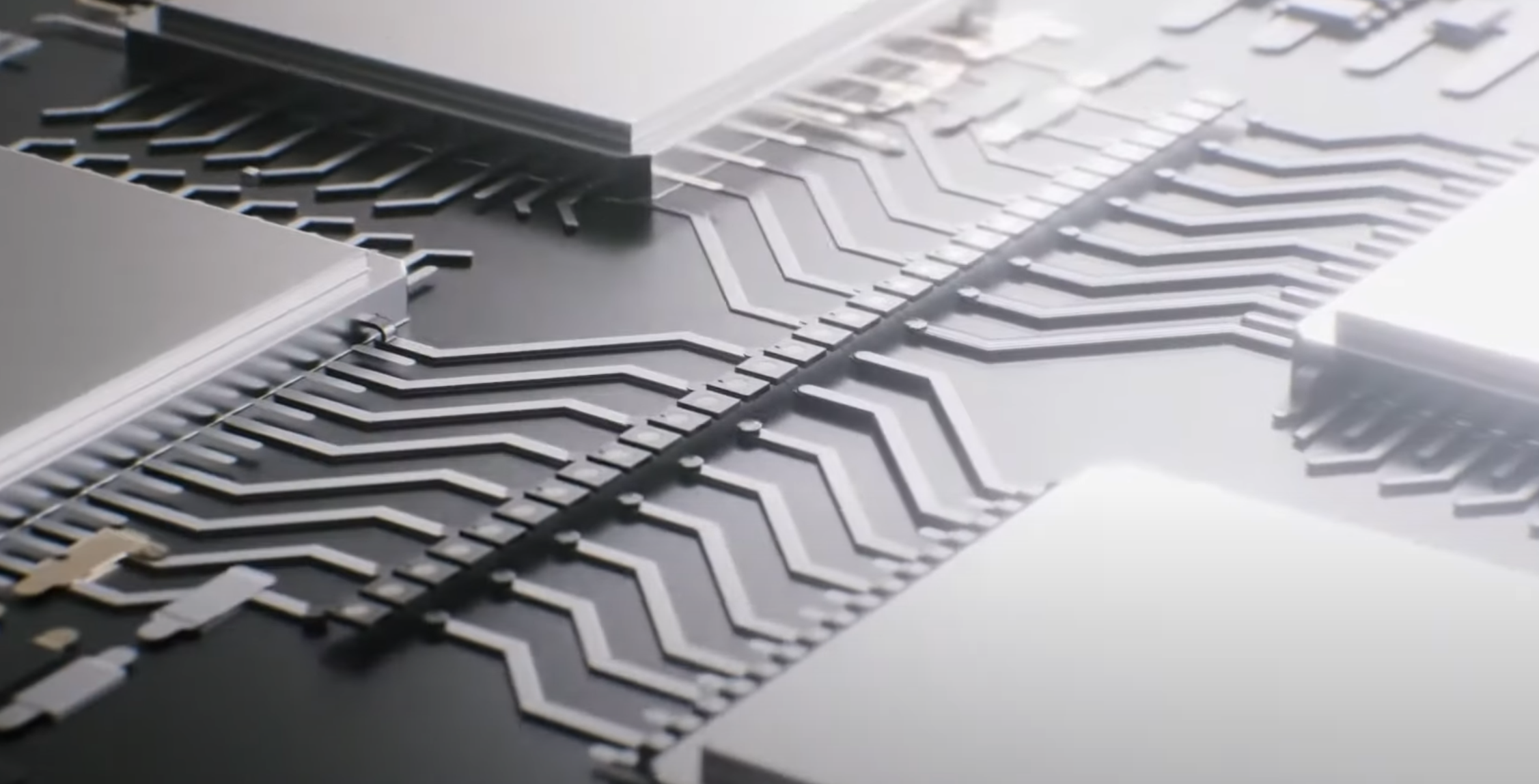
- ASIC 기술을 통해 수백개의 레이저 모듈을 단일 칩에 통합시켜 만든 LiDAR이다.
- 이는 뛰어난 거리 측정 해상도와 정확성을 제공하며, 단순화된 제조를 통해 효율성과 일관성을 높인다.
Reference
https://www.youtube.com/watch?v=3EehCU3csJQ&t=18s