
Jinwon Kim
Research Engineer
Korea Robot Manufacturing
mqjinwon@gmail.com
I am a Research Engineer and Team Lead of the Robot Intelligence Team at Korea Robot Manufacturing (KRM), building autonomous navigation and AI systems for quadruped robots. I got my M.S. in Robotics from KAIST (2023) at the SGVR lab under Prof. Sung-Eui Yoon, and my B.S. from Kwangwoon University (2021).
My work covers the full robot stack — SLAM, motion planning, and mission-level decision making — deployed on real hardware in outdoor environments. I am particularly interested in legged robot locomotion, reinforcement learning, and system identification for closing the sim-to-real gap.
News
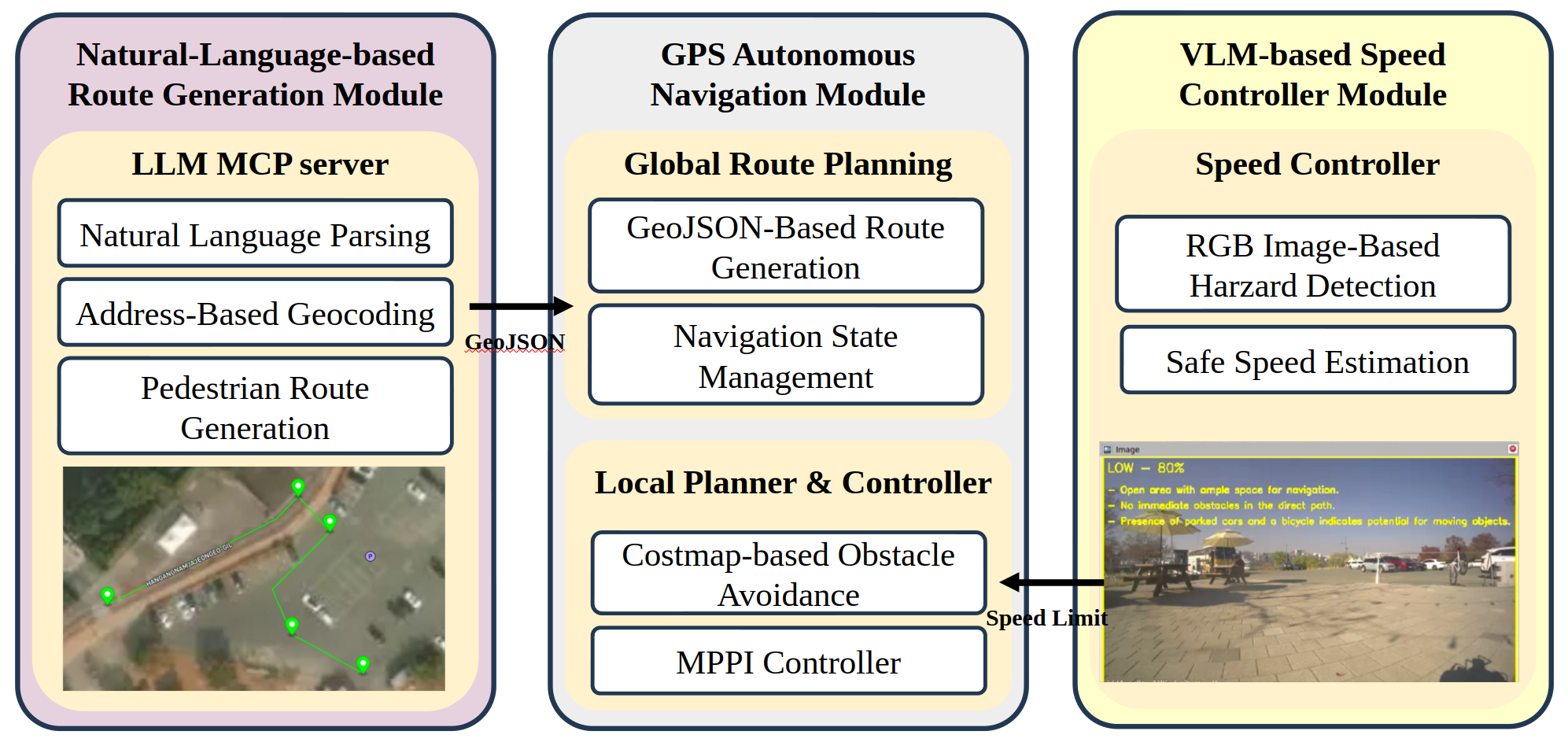
- 2026.02 🎉 Paper accepted at KROC 2026 — Urban autonomous robot navigation via natural-language route instructions and VLM-based situation understanding. (Corresponding Author)
- 2025.11 Paper accepted at ICCAS 2025 — ATBT: Adaptive Topological Map-Based Behavior Tree for Quadruped Robots. (Corresponding Author)
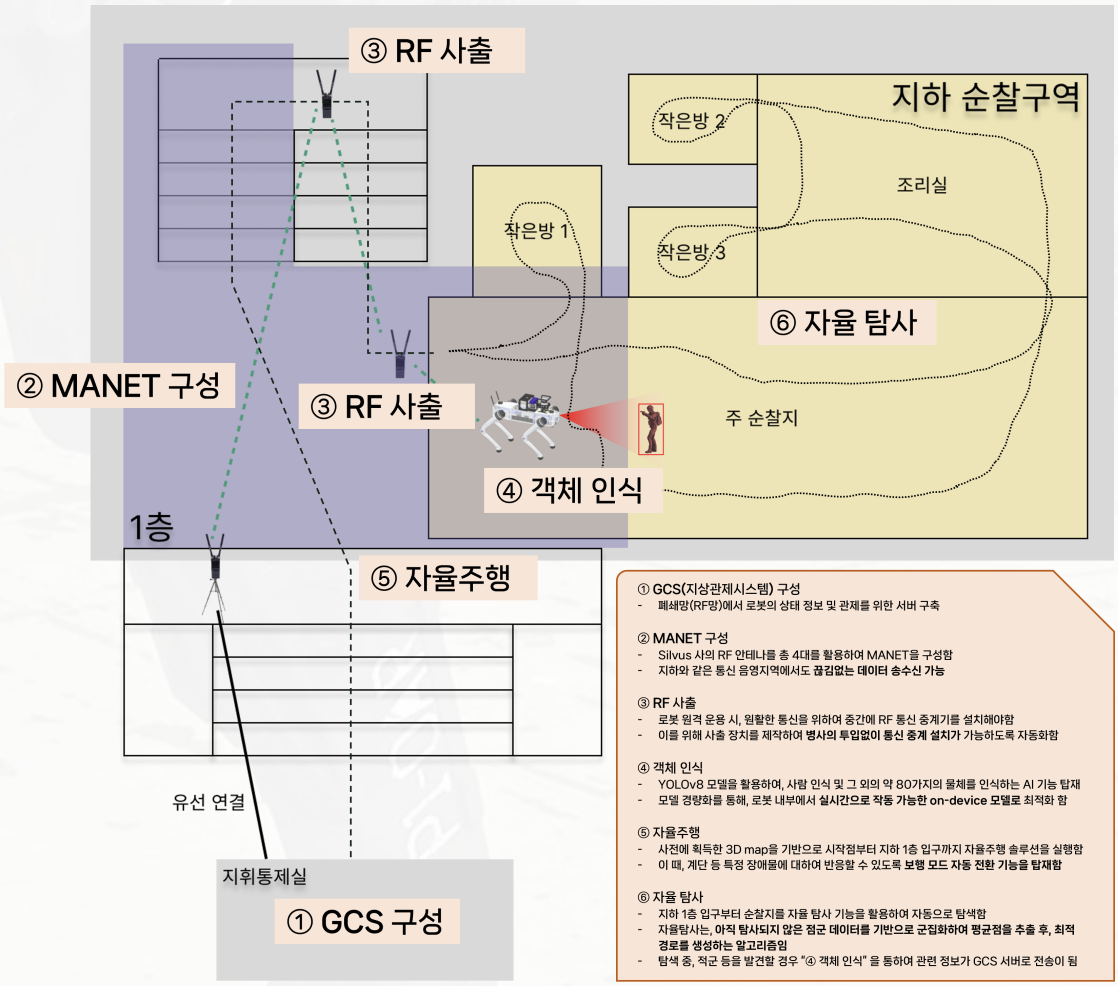
- 2024.11 우수포스터상 at 국방로봇학회 제4회 학술대회 — 사족보행로봇을 활용한 통신 지연없는 지하 자율정찰 기술 연구.
- 2024.09 최우수상 at 2024 국방부장관배 드론봇챌린지 감시정찰분야 — 통신음영지역에서의 사족보행로봇 자율탐사.
- 2023.08 최우수상 at 2023 국방부장관배 드론봇챌린지 감시정찰분야 — 원격조종을 통한 사족보행 운용 가능성 검증.
- 2023.05 Joined Korea Robot Manufacturing (KRM) as Research Engineer, building full-stack autonomous navigation systems for the quadruped robot V60.
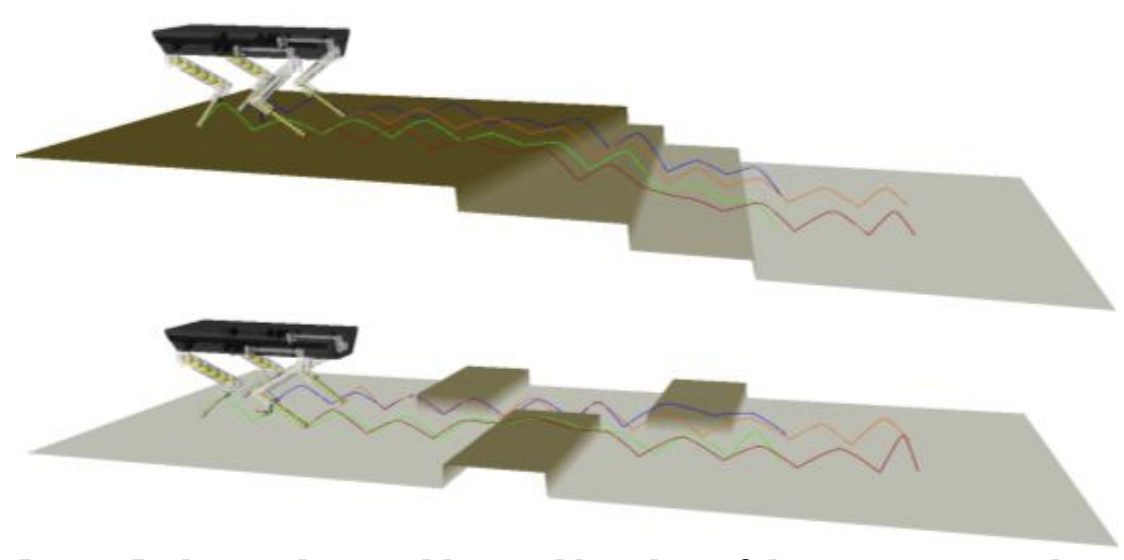
- 2023.02 Received M.S. in Robotics from KAIST. Thesis on collision-backpropagation based obstacle avoidance for legged robots.
Publications
-
-
-
 Autonomous Multi-Floor and Narrow Indoor Exploration Using Multi-Criteria Decision-Making ApproachUR 2025
Autonomous Multi-Floor and Narrow Indoor Exploration Using Multi-Criteria Decision-Making ApproachUR 2025 -
-
 Collision-backpropagation based obstacle avoidance method for a legged robot expressed as a simplified dynamics modelICCAS 2022
Collision-backpropagation based obstacle avoidance method for a legged robot expressed as a simplified dynamics modelICCAS 2022 -
-
Projects
Robot Navigation
2020.06
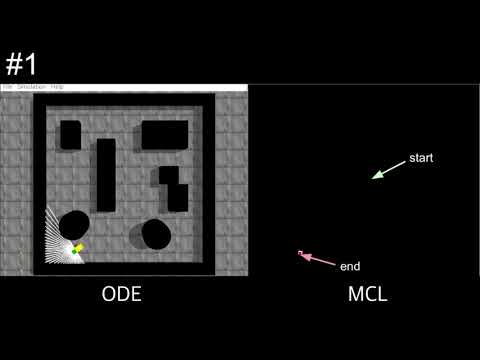
Implementation of classical navigation algorithms including Voronoi diagram, A*, Monte Carlo Localization, and potential fields.
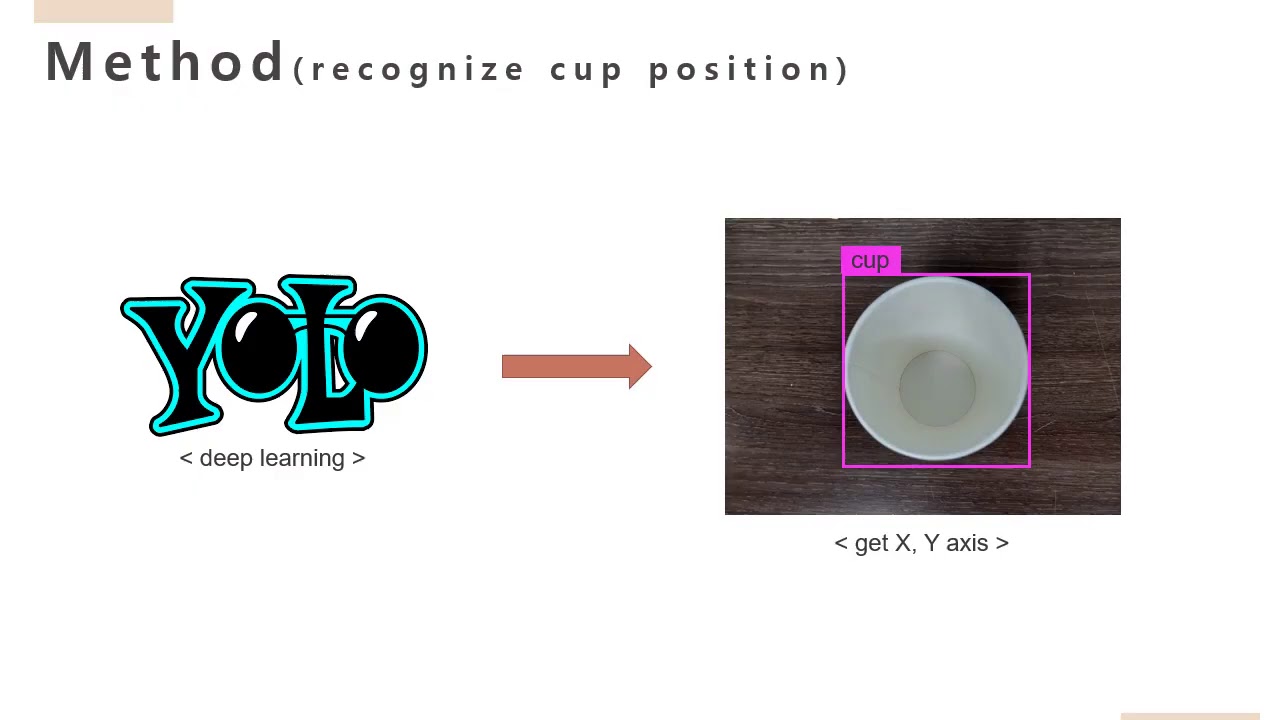
Robot Barista
2020.03
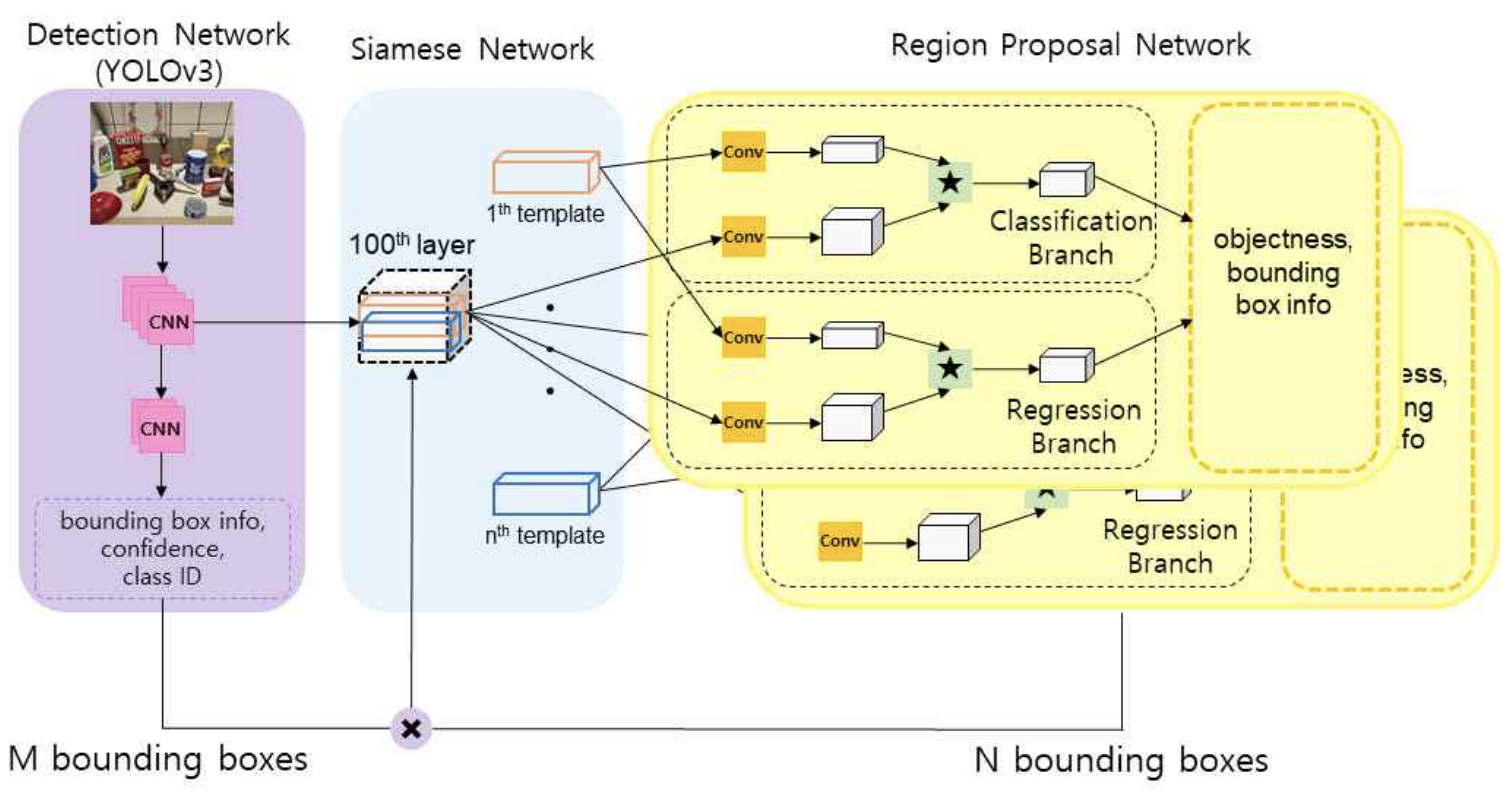
4-DoF manipulator for automated drip coffee preparation using YOLO-v3 for target detection.
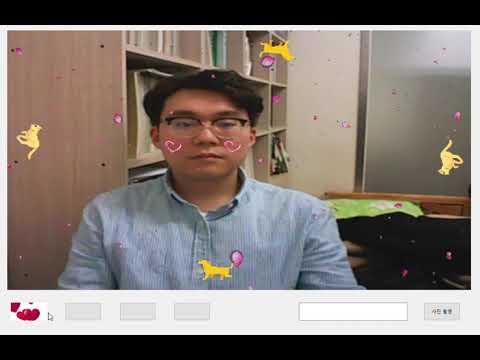
Decorate Face
2019.09
Real-time face decoration application using OpenCV — overlay images and GIF animations on video feed.
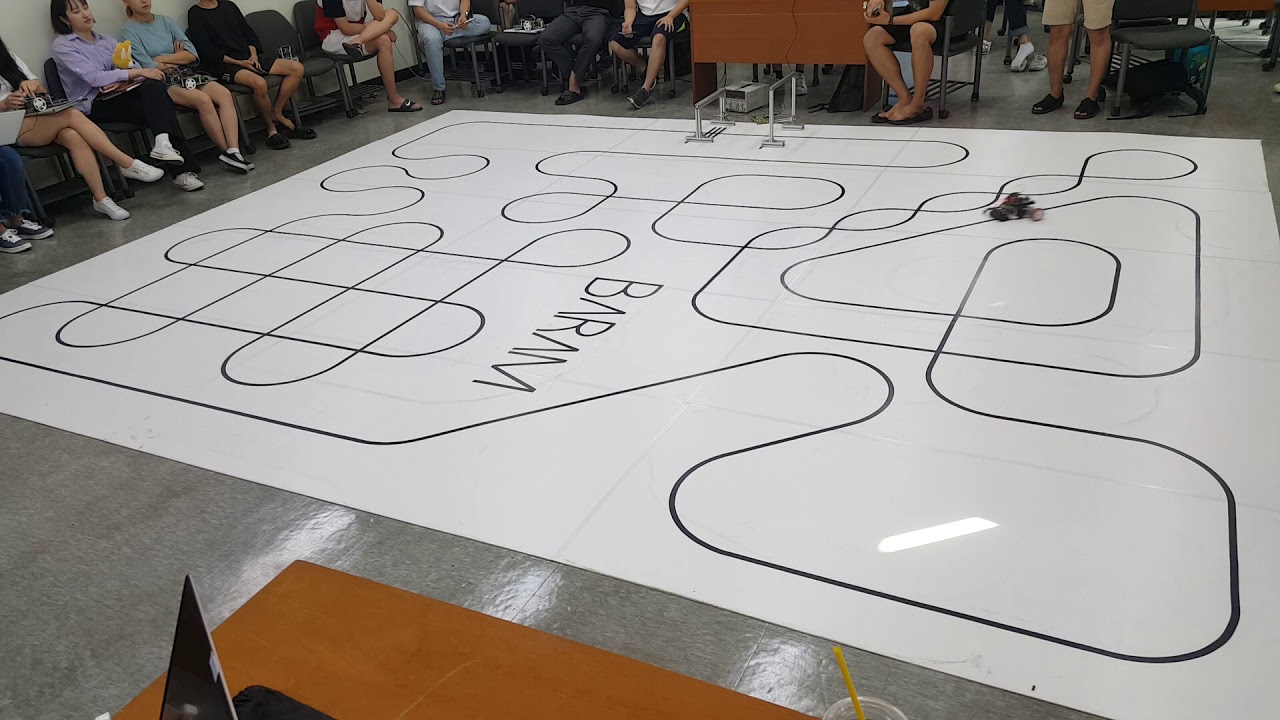
Linetracer
2018.06
Autonomous line-following robot using ATmega128, IR sensors, and PD control.
Awards & Patents
-
2024
특허 출원 — 장애물을 고려한 로봇의 이동 경로 결정을 위한 로봇 경로 제어 장치 및 방법
-
2024
최우수상 — 2024 국방부장관배 드론봇챌린지 감시정찰분야
-
2024
우수포스터상 — 국방로봇학회 제4회 학술대회
-
2023
최우수상 — 2023 국방부장관배 드론봇챌린지 감시정찰분야
-
2022
특허 등록 — 샴 네트워크를 활용하는 강인한 다중 객체 검출 장치 및 방법
-
2018
장려상 — 2018 Open SW 미니 해커톤